人間形ロボット
 |
こんな人間形ロボットつくります |
人間形ロボット製作例(1)
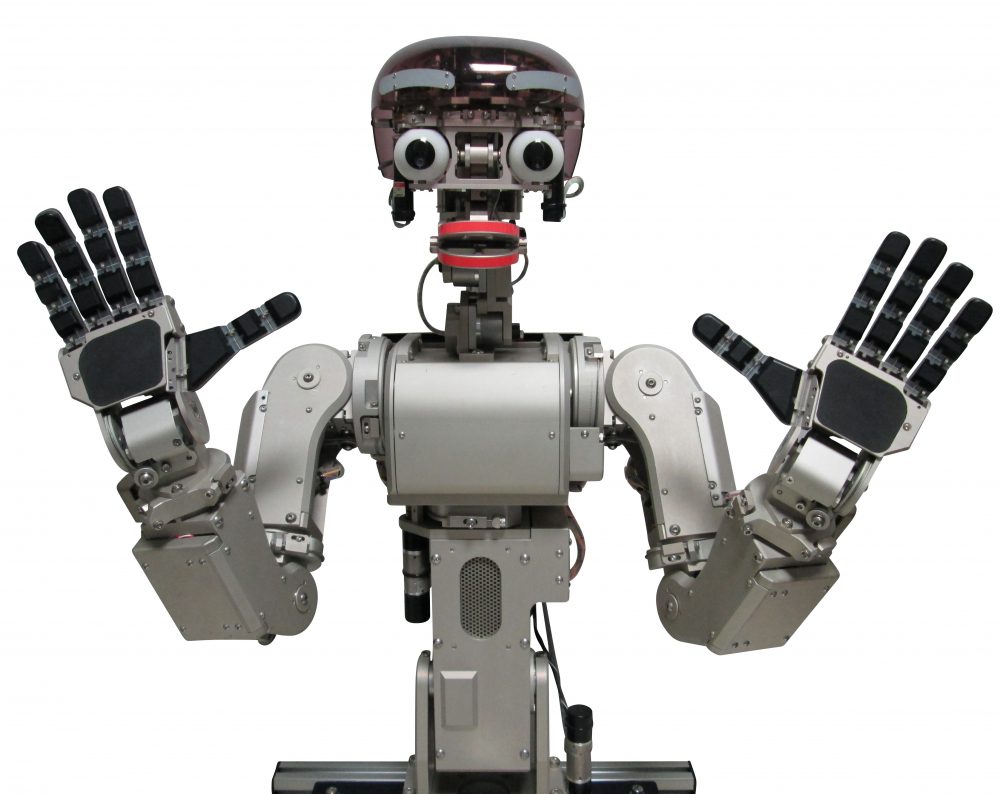 |
インファノイド
身長約 60cm 体重14kg 28カ所が可動
各関節の可動範囲は人間とほぼ同じ
頭、眉、眼、唇の動きで表情が作れる
ワイヤで駆動力を伝達、軽量化とともにスムーズな動作
人間形ロボット製作例(2)
 |
夢ロボ 上海万博 日本産業館に展示
地上5mから20mの間を往復
身長1.4m 体重40kg
当社はロボットメカ全体を設計製作
企画 : 堺屋太一氏
デザイン : 株式会社喜多俊之デザイン研究所
現地運営・制御 : マッスル株式会社
他に十数社の協力で完成
人間形ロボット製作例(3)
 |
マスコットロボット
数社の協力で製作、当社はメカ全体を設計
5自由度、身長 約600mm(台座別)、体重 約10kg
首を左右に振る
両手を上下に動かす
両足をバタつかせる
3つの押しボタンで3種類の音声を出す
外装はFRP