人間形ロボット インファノイド(過去実績・参考)
人間形ロボット インファノイド(情報通信研究機構との共同製作)
|
|
インファノイド |
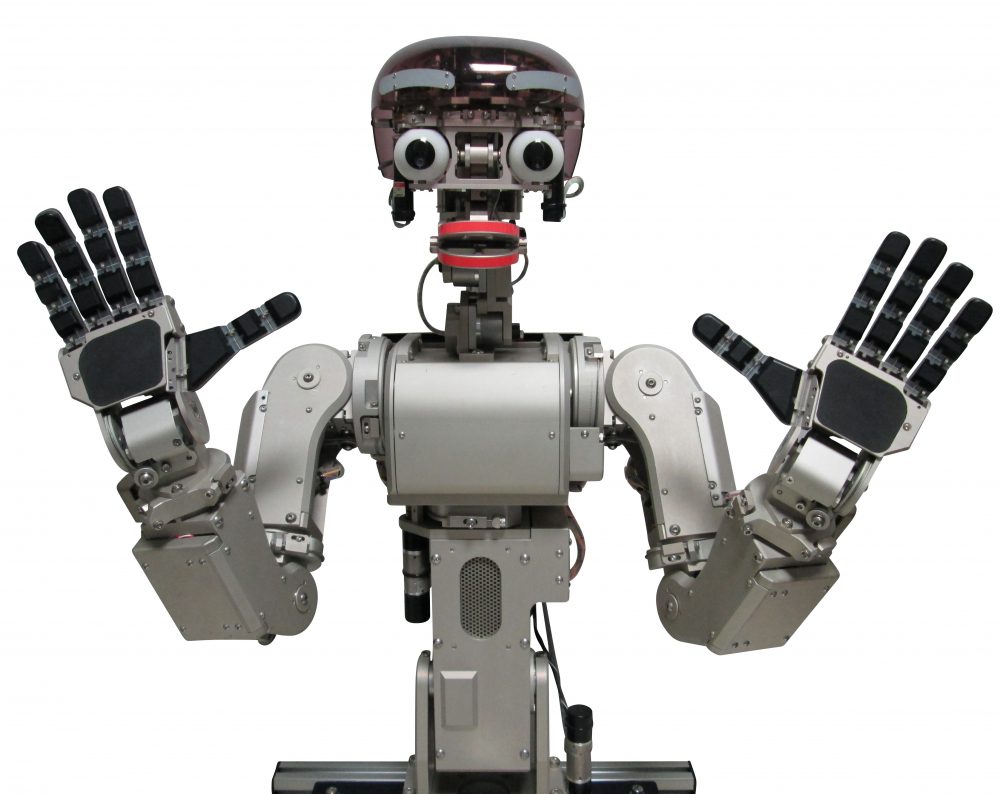

身長(上半身) 約 60cm、体重14kg
28カ所が可動し、各関節は人間とほぼ同じ可動範囲
頭、眉、眼、唇の動きで表情を作る
眼にカメラを内蔵し、見えるものを視線で追従
「アッチ向いてホイ」で遊んでくれる
モータ+ワイヤ駆動で軽量化+スムーズな動作
情報通信研究機構と当社の共同製作
06-6978-2299
人間形ロボット インファノイド(情報通信研究機構との共同製作)
|
|
インファノイド |
身長(上半身) 約 60cm、体重14kg
28カ所が可動し、各関節は人間とほぼ同じ可動範囲
頭、眉、眼、唇の動きで表情を作る
眼にカメラを内蔵し、見えるものを視線で追従
「アッチ向いてホイ」で遊んでくれる
モータ+ワイヤ駆動で軽量化+スムーズな動作
情報通信研究機構と当社の共同製作